
L’univers des drones propose une panoplie de contrôleurs pour moteurs brushless qui semblent intéressant à détourner pour une utilisation autre, notamment les moto-planeurs, les avions…
J’ai choisi ce contrôleur (3à6S-45A) de drone de chez ‘Tmotor‘ constructeur bien connu et réputé.
Attention pas de BEC sur ce contrôleur, l’alimentation du modèle est faîte par une autre source.
Ce contrôleur fonctionne sous l’environnement BLHeli_32 (32bits) et nécessite un logiciel de programmation sur PC et une clé USB d’interface.
J‘ai opté pour cette clé d’interface mais il en existe bien d’autres modèles.
Dès sa connexion sur un port USB du PC, elle apparaît sur un port COM émulé (ex: COM3 sur le mien). A noter que le port COM peut être imposé avec l’environnement de paramétrage du PC.
Le paramétrage du contrôleur nécessite bien entendu un logiciel spécifique.
La plateforme ‘GitHub’ fourni une suite de programmation répondant à nos besoins.
https://github.com/bitdump/BLHeli
Il existe d’autres logiciels mais celui-ci fonctionne très bien.
Il faut télécharger la suite BLHeliSuite32_32.10.0.0.zip
à l’adresse: https://github.com/bitdump/BLHeli/releases
puis procéder à son installation.
Dans le répertoire d’installation on trouve le programme à lancer pour la programmation
BLHeliSuite32.exe
et dans le sous répertoire ‘.\Manuals’ la documentation sur le logiciel BLHeli_32 manual ARM Rev32.x.pdf.
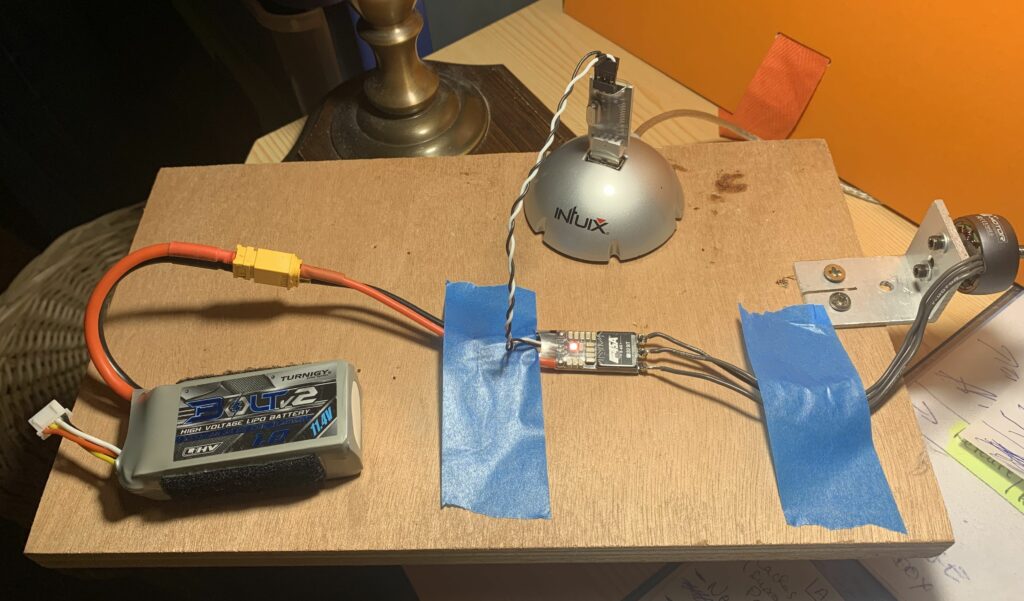
Pour les premiers tests j’ai utilisé un petit moteur de drone connecté au contrôleur.
Un accu 3S alimente le contrôleur.
Montage:

Les différentes étapes:
1 => Connecter la clé sur un port USB du PC (ici elle apparaît sur le port COM3)
2 => Lancer le programme BLHeliSuite32.exe
3 => Connecter le connecteur Berg sur la clé en respectant le sens (2 fils seulement ici, la masse et le signal).
4=> Alimenter le contrôleur (ici un 3S)
5=> Sélectionner dans le menu ‘Select BL_Heli_32_ Interface’ (ici BootLoader USB/ port Com’ ), puis entrer le port COM utilisé en bas de l’écran (ici COM3)
6=> Lancer la connexion Programme <=> Clé avec le bouton ‘CONNECT’ (La led flash sur la clé)
7=> Lire la programmation actuelle du contrôleur avec le bouton ‘Read Setup’. Dès lors tous les paramètres s’affichent à l’écran. Par sécurité sauvegarder la configuration actuelle en utilisant le menu ‘Esc SetUp/save….’ et en donnant un nom.
8 => Modifier les paramètres affichés selon vos besoins… tous ne sont pas nécessaires pour une utilisation moto-planeur, avion, la description de chacun se trouve dans la notice BLHeli_32 manual ARM Rev32.x.pdf. Sauvegarder la nouvelle configuration en donnant un nouveau nom.
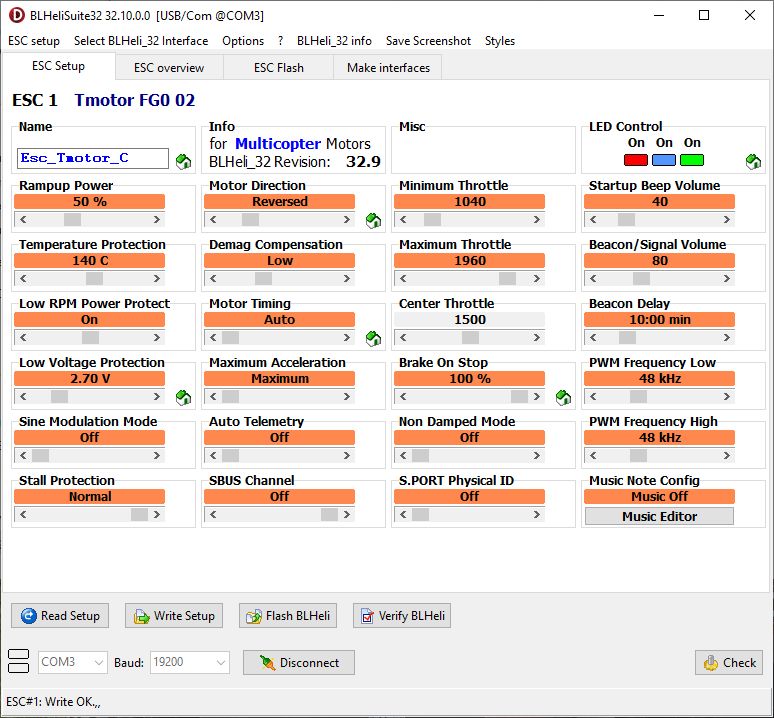
9 => Flasher la nouvelle configuration dans le contrôleur avec le bouton ‘WRITE SETUP‘.
10 => Déconnecter la clé avec le bouton ‘DISCONNECT‘ puis la retirer.
Le pilotage de l’ensemble se fait avec un testeur de servo générant des impulsions allant de 1000 à 2000µs.

Faire fonctionner le moteur sur toute la plage programmée en balayant de 1000 à 2000µs.
Vérifier à l’arrêt le bon fonctionnement du frein moteur si vous l’avez programmé.
Propulsion de base sur un planeur léger en 3S, moteur Xpower 2910/10 et hélice 11×7 Aéronaut.

Cette configuration permet de tirer 380W et assurer une montée tranquille à 9-10m/s.
A noter que le contrôleur accepte le 4S, en changeant le moteur, l’accu et l’hélice la puissance peut être largement augmentée!