Le Vibe2
DF – Réalisation N°36 2018 & N°43 (électrique) 2021
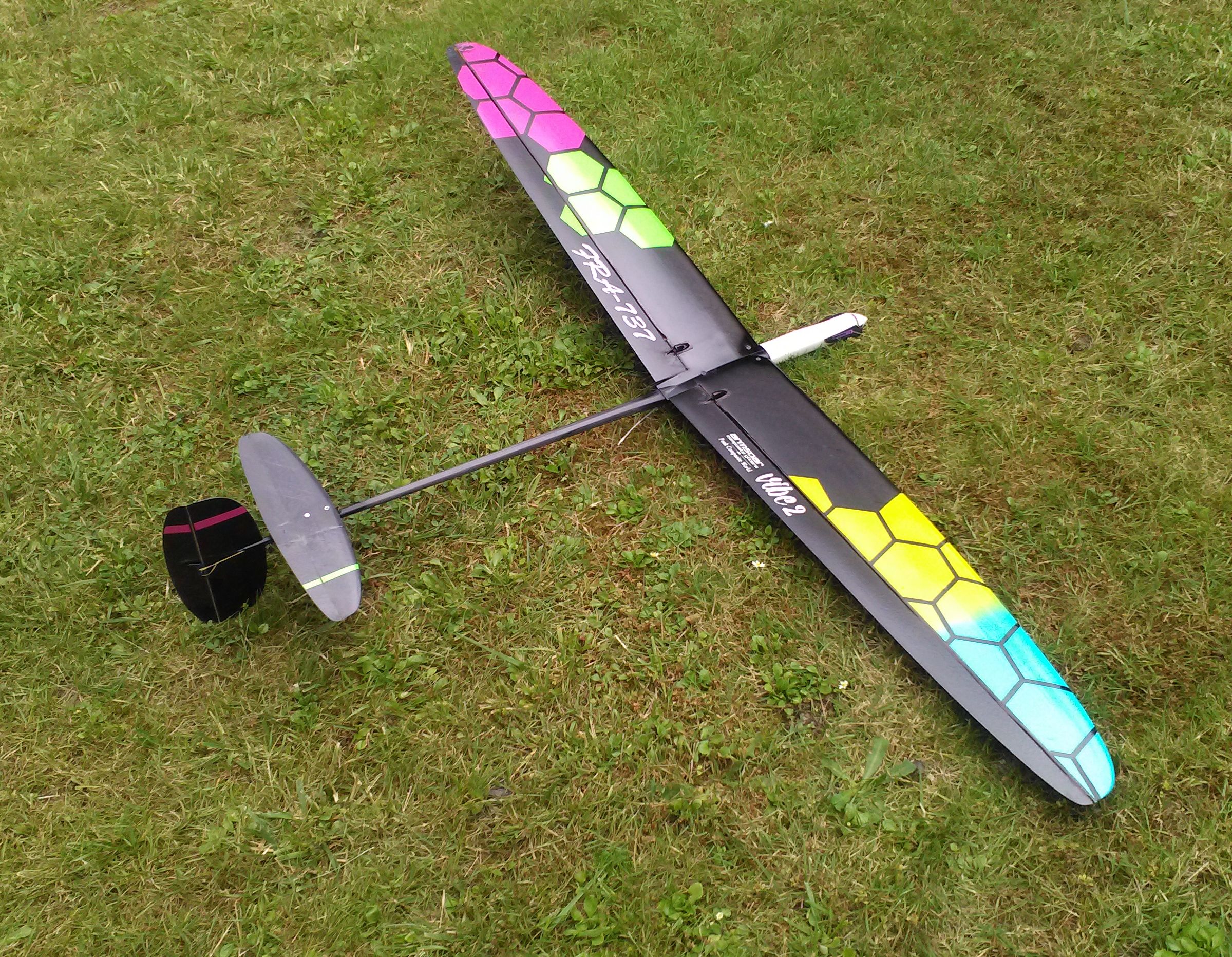
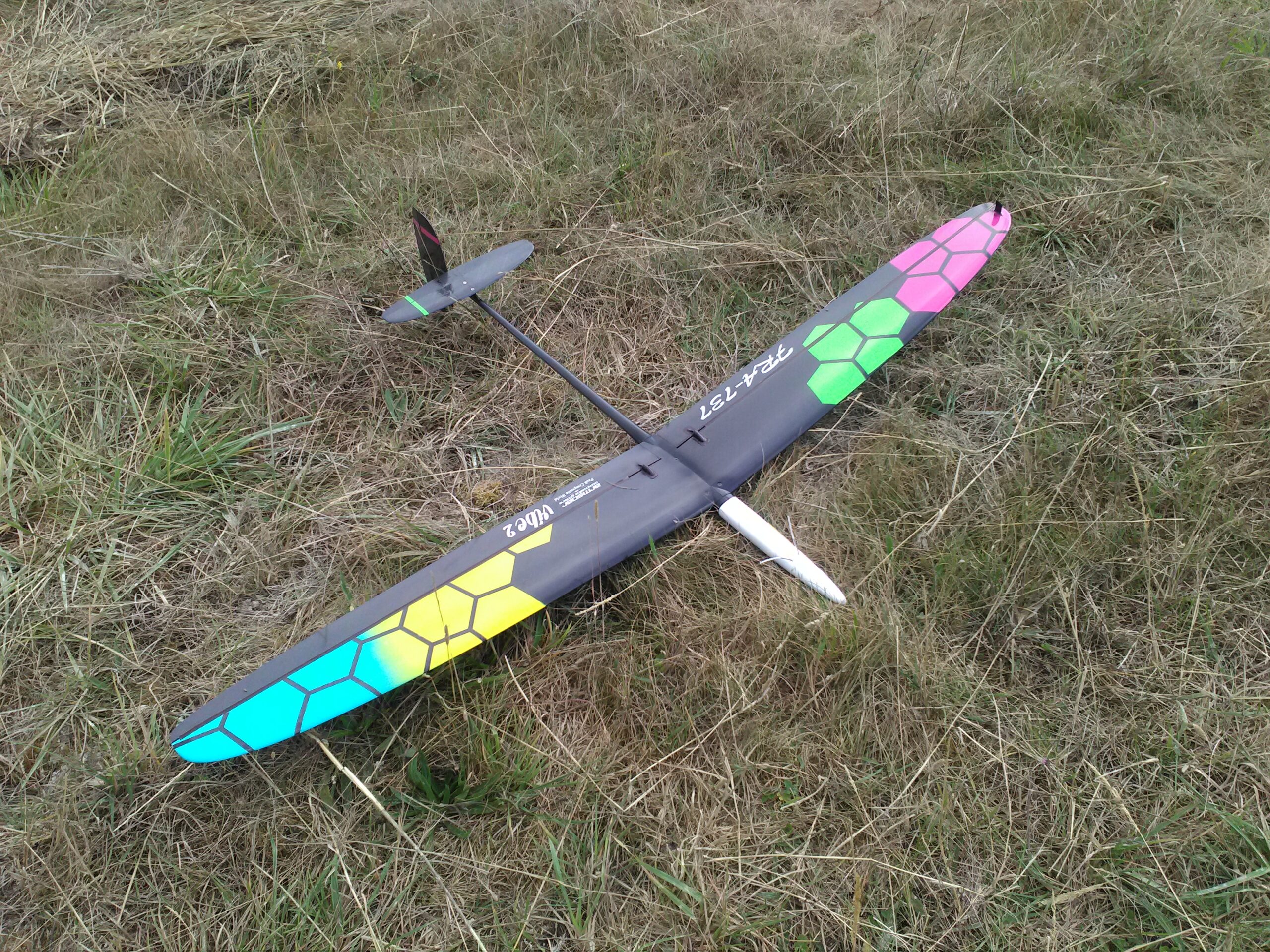
Après le Blaster2, j’ai acheté (comme troisième main…) en 2018 un ‘Vibe2’, mon deuxième lancé main pour progresser dans la discipline.
Ce modèle m’a permis de continuer à goûter aux joies du F3K et à participer à quelques concours.
Ma technique du lancé n’avait hélas guère progressé depuis mon Blaster2, les classements s’en ressentirent.
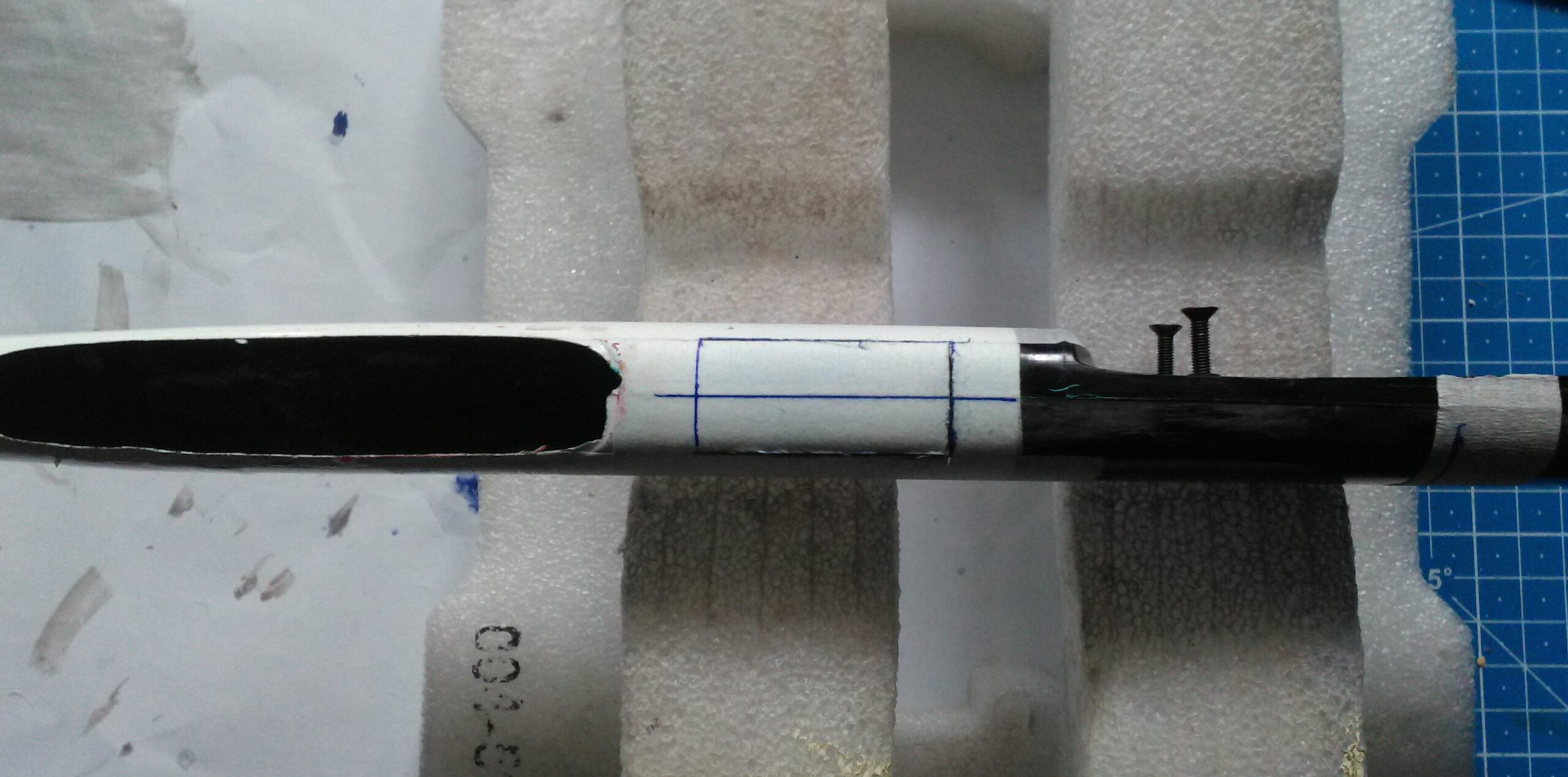
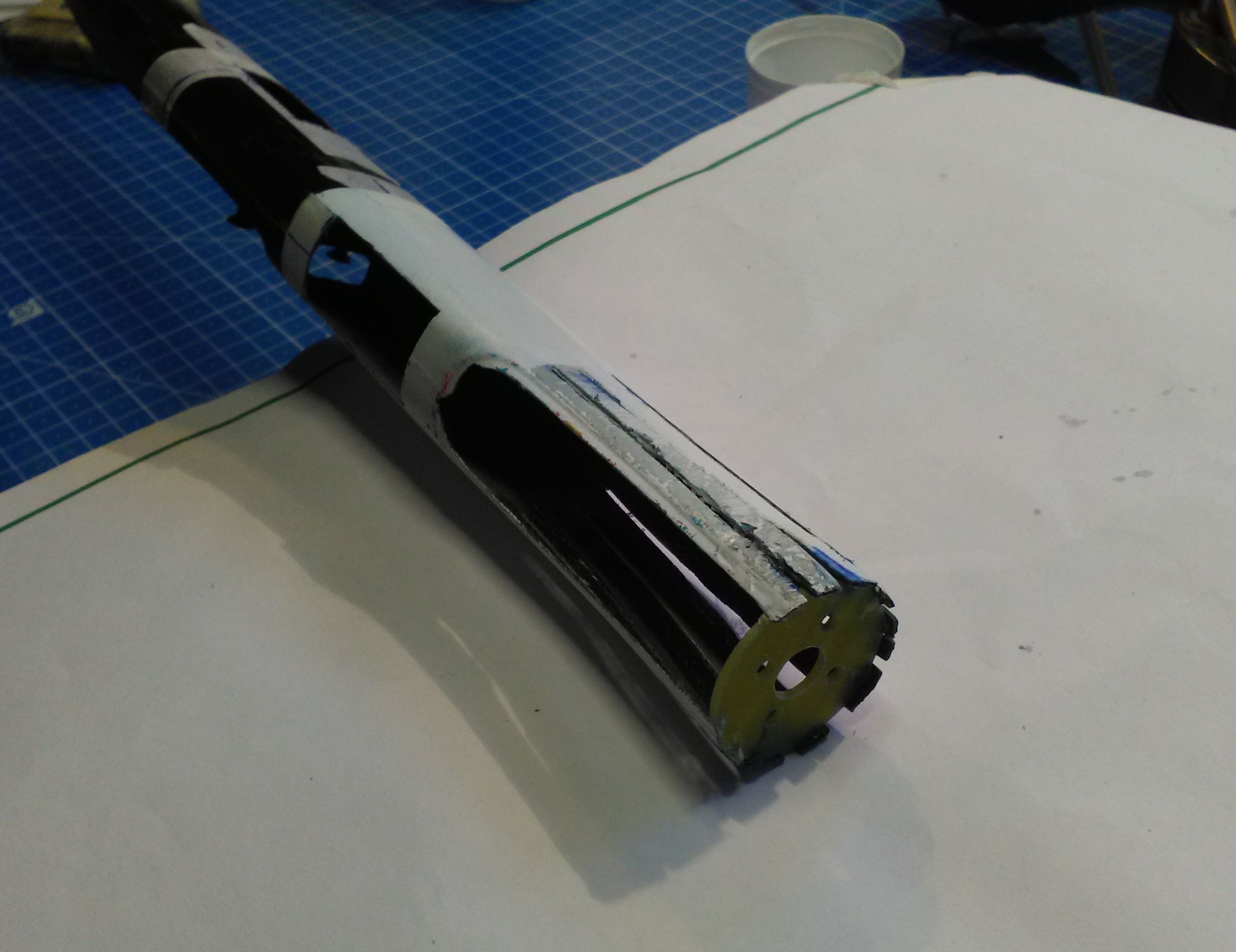
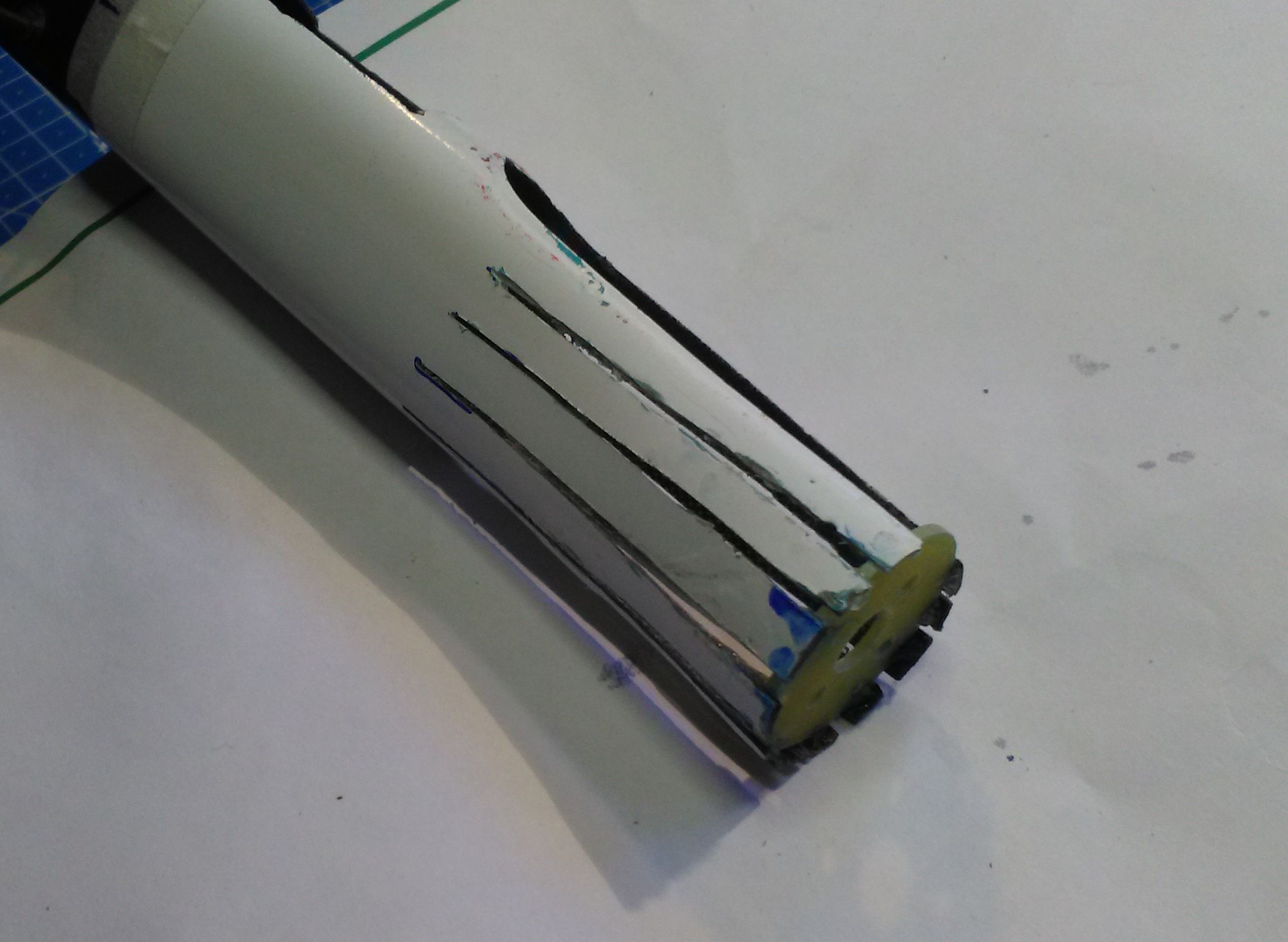
La machine sans être dépassée, présentait des signes de fatigues suite à son utilisation intensive par ses deux autres précédents propriétaires.
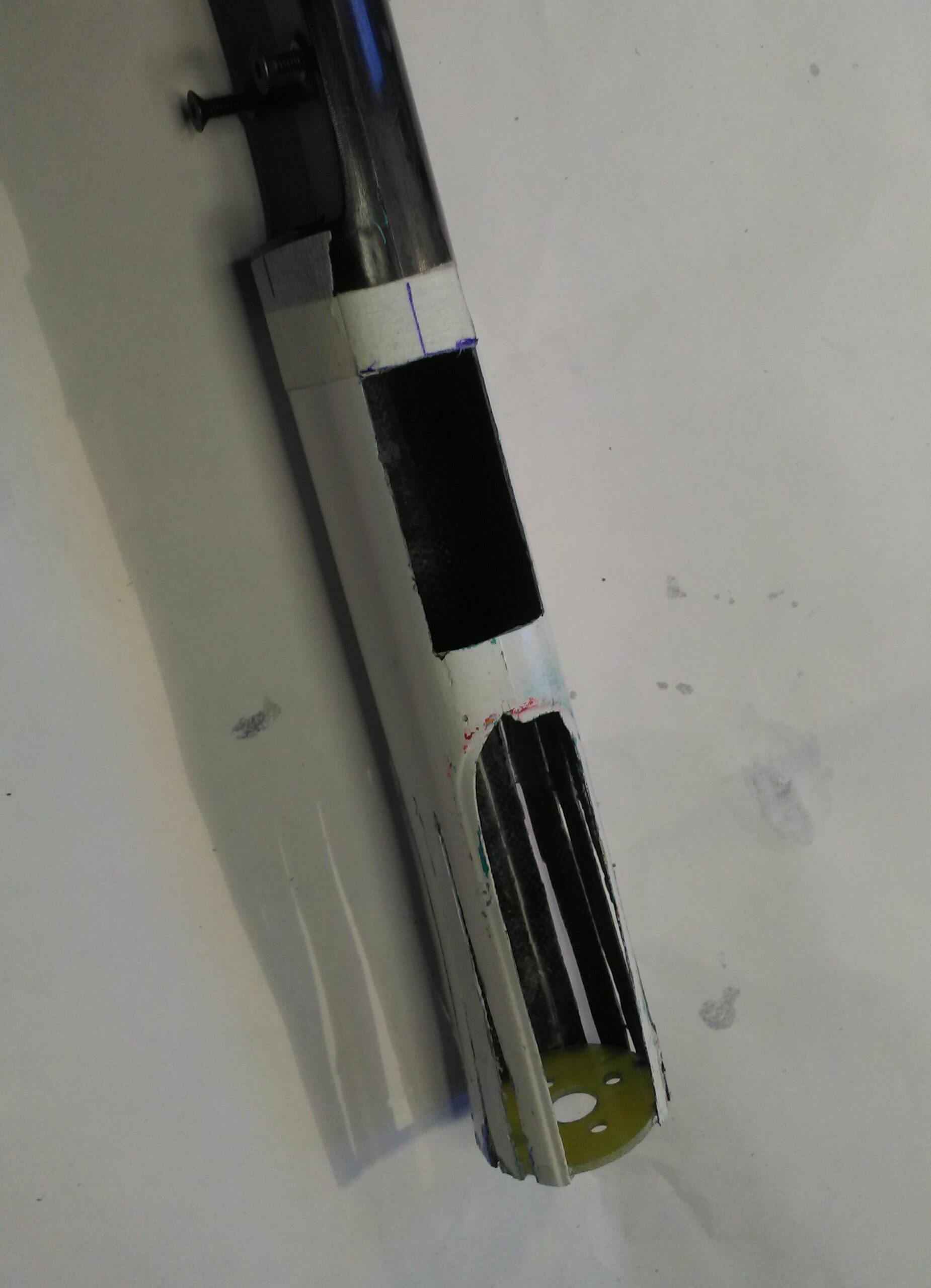
Une révision complète avec renforcement et changement de certains organes furent nécessaire.
Les servos seront gardés mais l’alimentation et le récepteur renouvelés.
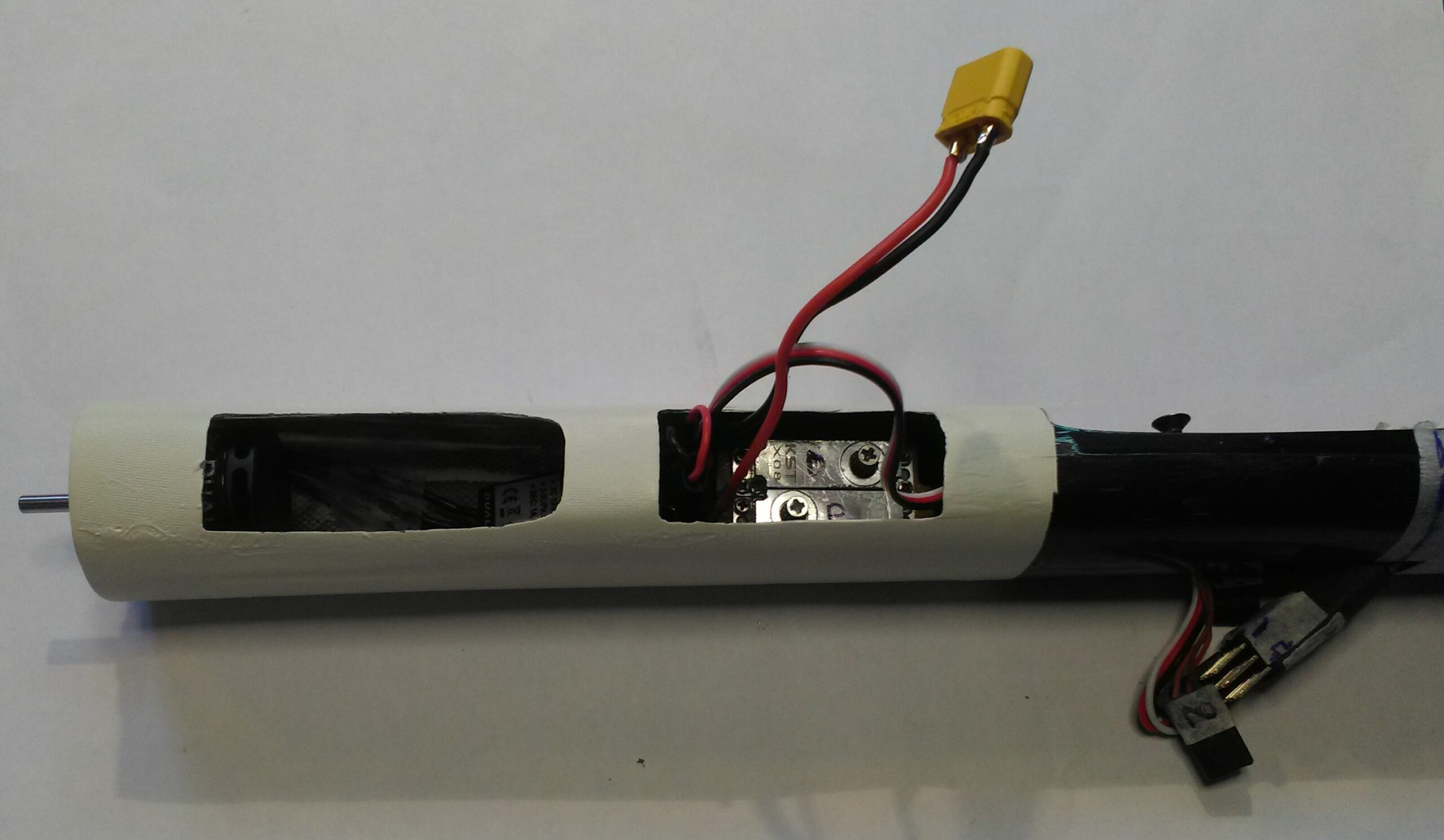
Matériel utilisé:
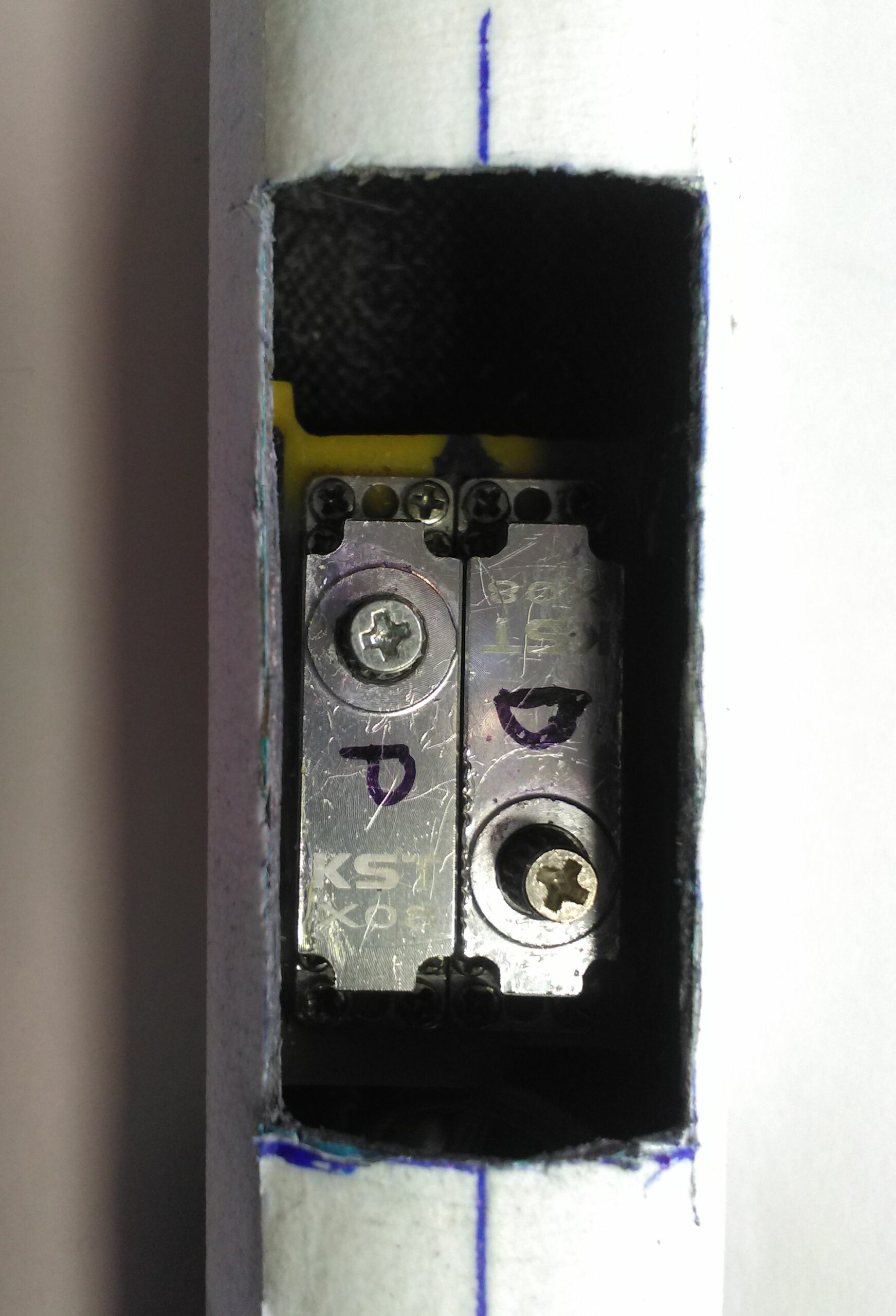
Servos direction et profondeur => KST X08 mg
Servos ailerons => KST X08 mg
Accus => Tattu 600ma 1S – 58x17x6mm –
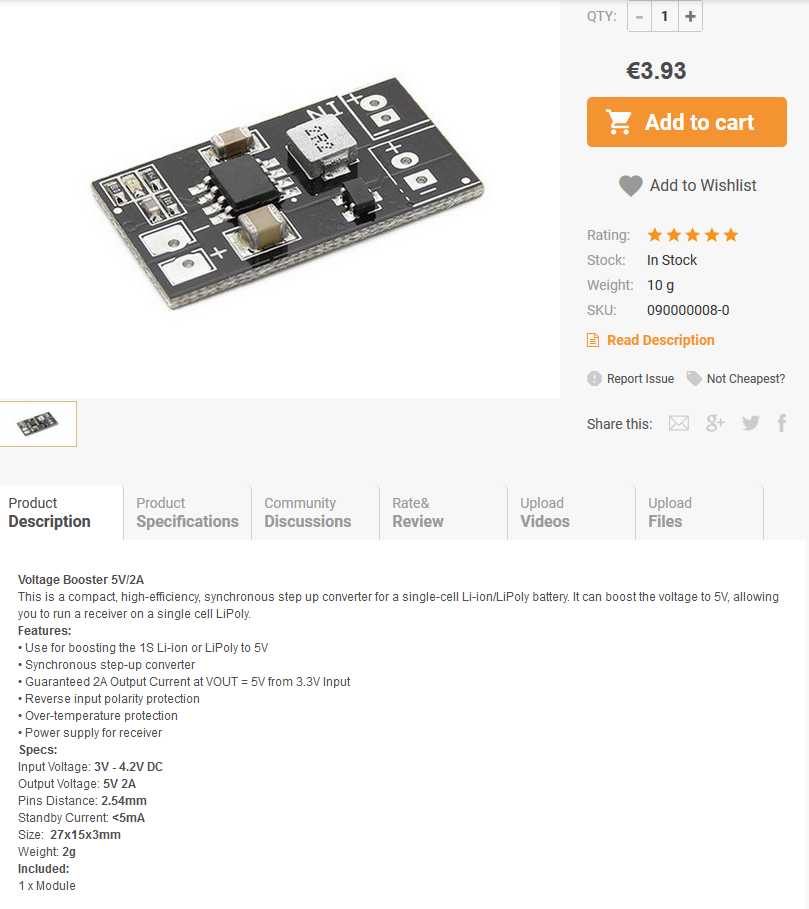
Booster => 1S > 5V-2A (2g)
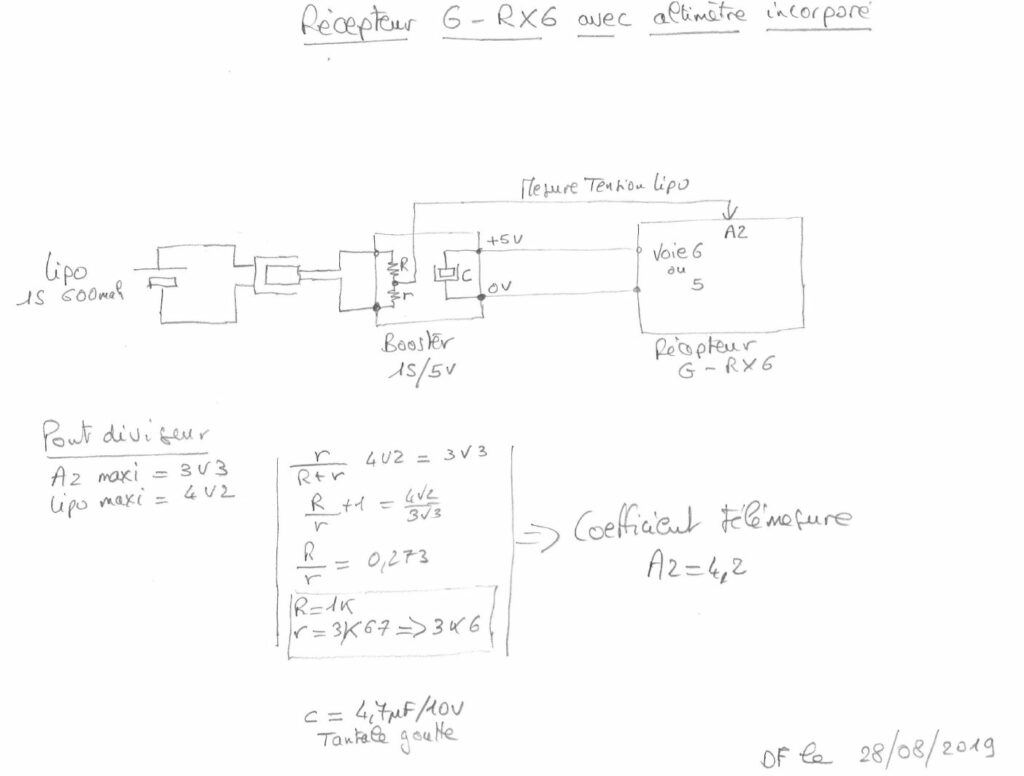
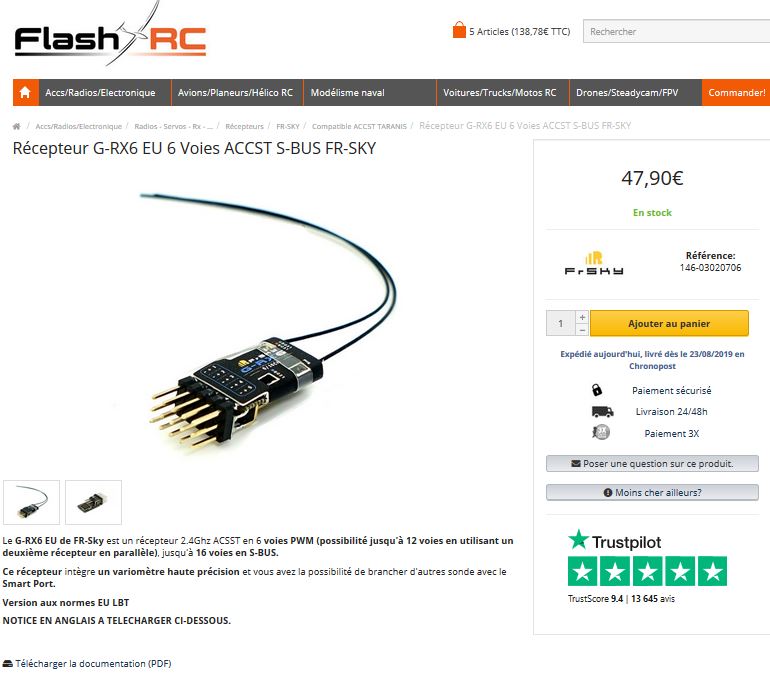
Récepteur => G-RX6 Frsky avec altimètre incorporé
La tension de l’accu, via un pont diviseur, entrait sur une entrée d’acquisition du récepteur, permettant ainsi son contrôle d’état de charge.
Modélisation :
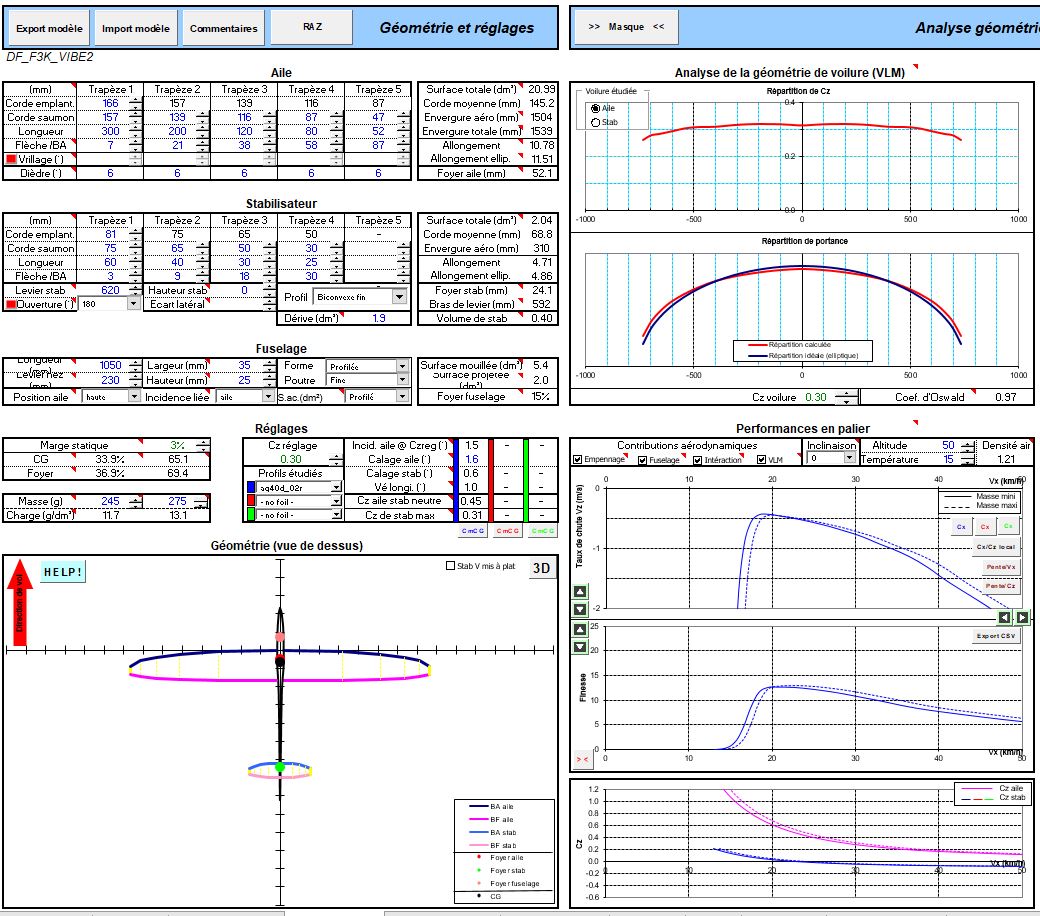
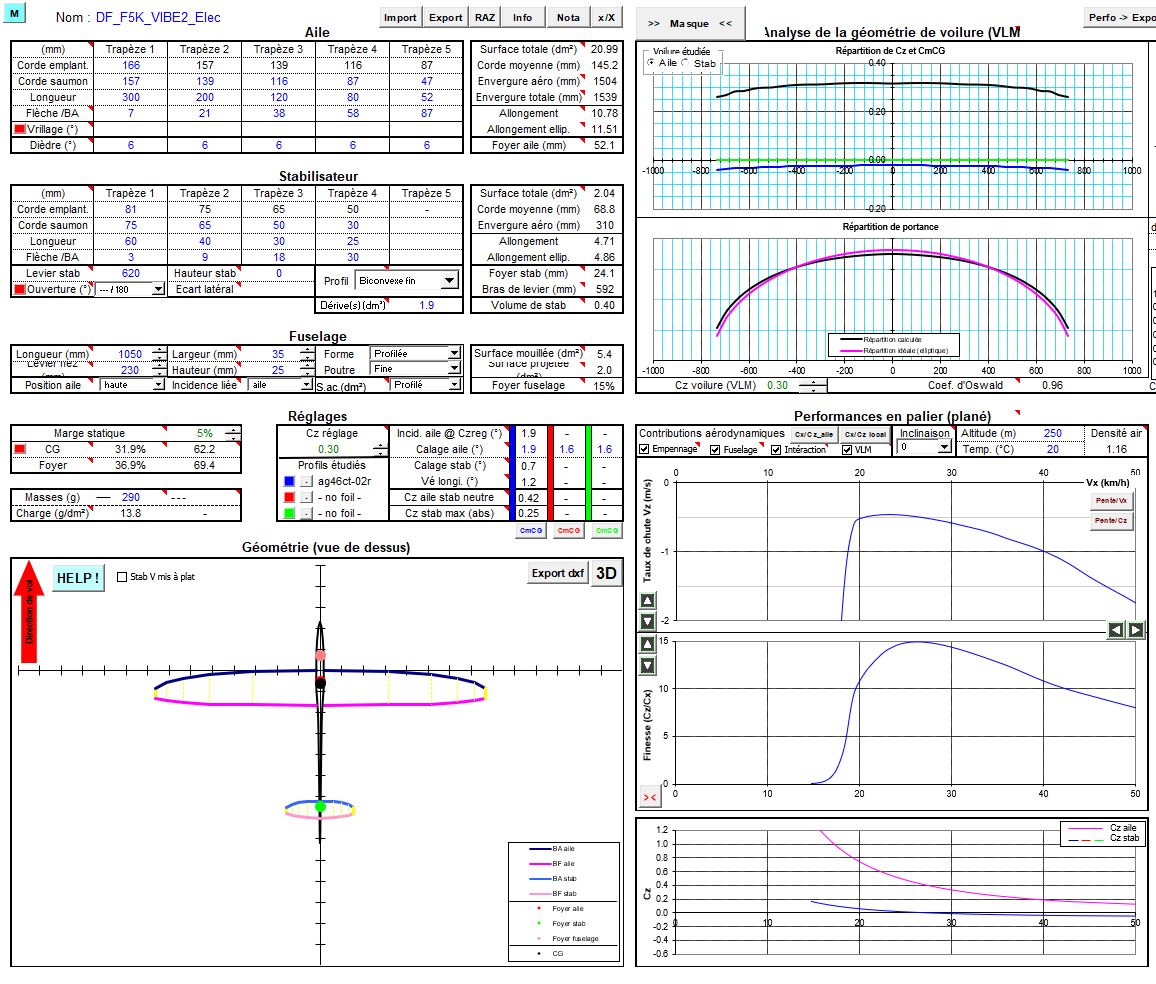
Je l’avais modélisé sous PredimRC mais avec un profil qui n’était pas le sien faute de le connaître…








Modélisation:
Modélisé sous PredimRC, le Vibe2 électrique affiche des performances très honnêtes pour une utilisation loisirs,
mais un peu lourd pour prétendre participer à la nouvelle formule F5K (Lancés main motorisés). A voir…
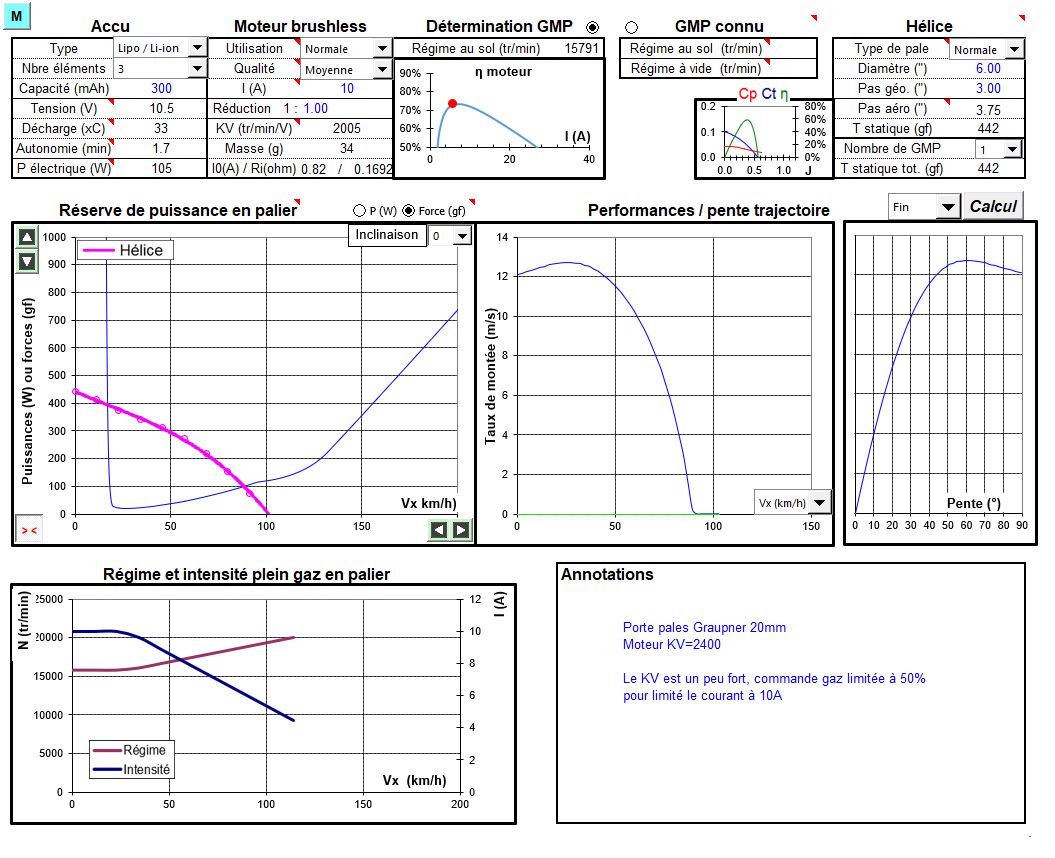
Coté propulsion la puissance est au rendez-vous, trop même…
A cause d’un KV moteur important (2300) pour l’hélice 6×3,
j’ai été contraint de réduire le courant maxi à 10A en jouant sur la courbe des gaz.
Cela donne une puissance d’environ 100W pour une masse à satelliser de 295g…
le 10m/s est atteint… montée très confortable!
Avec l’accus de 300mah je limite le temps moteur cumulé à 1 minute.
Selon la tactique cela donne
3 montées de 20s, 4 de 15s ou 6 de 10s.
A noter que les 100m de hauteur sont largement atteint en moins de 12s…