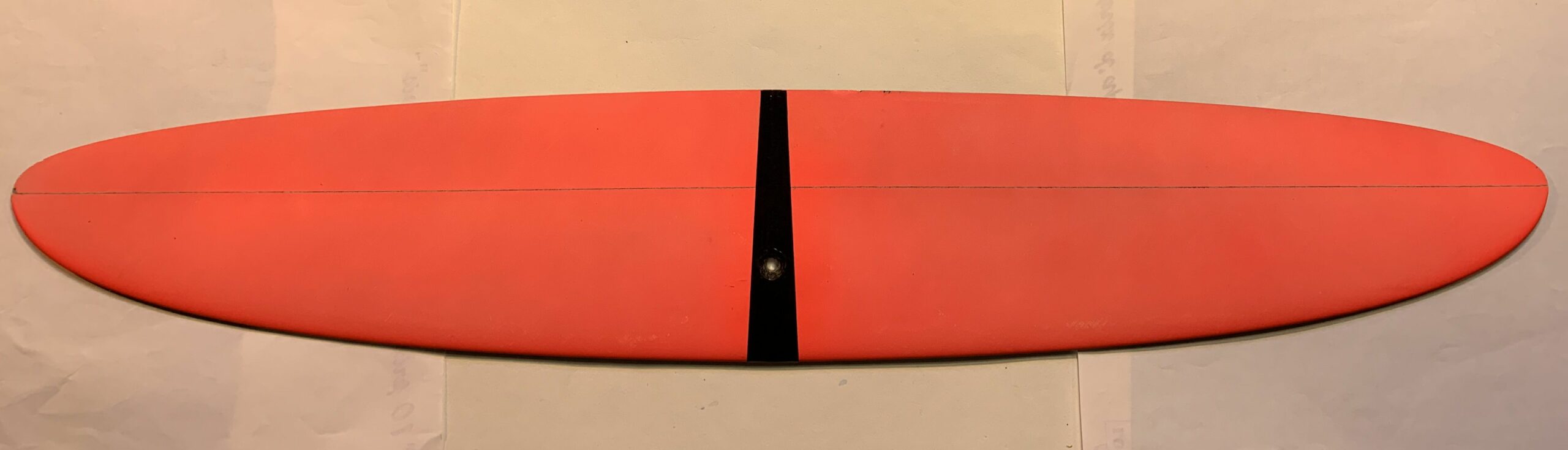
En novembre 2016 j’ai racheté un planeur Supra électrique tout neuf
à monter (Merci Thierry!) de chez ‘Vladimir’s Model’:
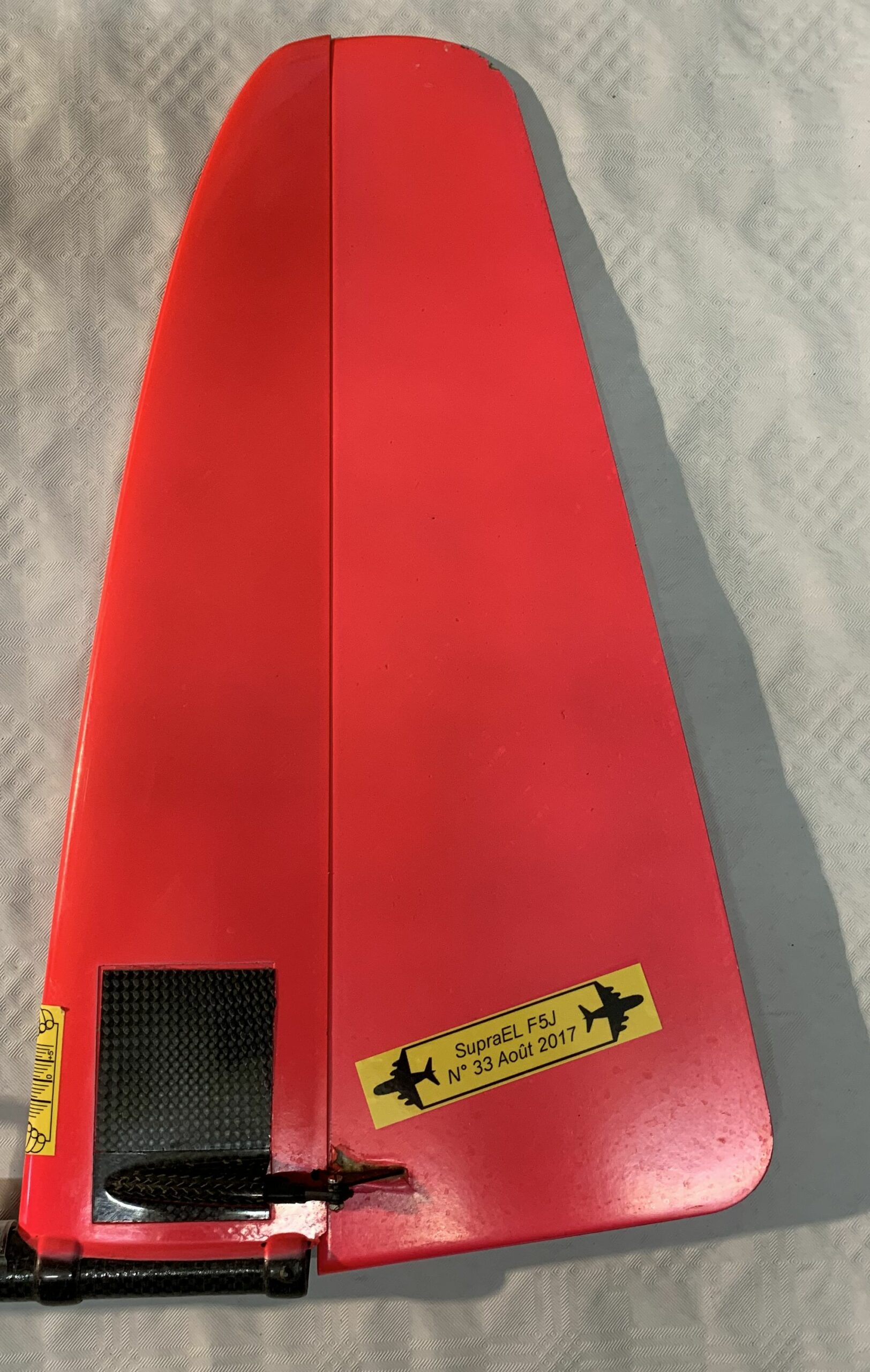
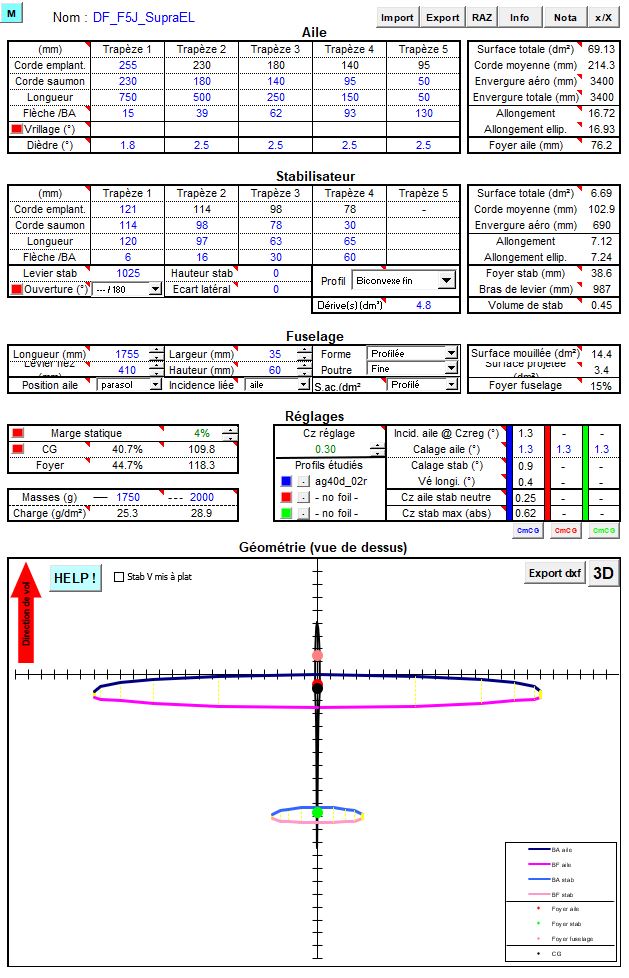
SUPRA EI Expert
J’ai beaucoup volé avec, participé à de nombreux concours catégorie F5J,
puis je l’ai laissé un peu de côté, lâchement abandonné….
Pour ma défense le matériel avait tellement progressé en F5J notamment sur les charges alaires
que les 25g/dm² de mon Supra le ramenait à un véritable fer à repasser…
A ce jour avril 2023 il cumule un nombre impressionnant de vols (plus de 350),
il a bien sur subi quelques réparations et pris de l’embonpoint.
Il a récemment repris du service (2023) avec de nouveaux réglages et c’est véritable plaisir que de le redécouvrir.

Je décris ci-après le montage, les réglages et les vols.
Didier
Articles sur d’autres modèles de Supra sur ce site
Supra Pro planeur => Planeur RC – Le Supra – Didier
Supra Première version à ogive => Planeur RC – Le Supra (Version 1) – Didier



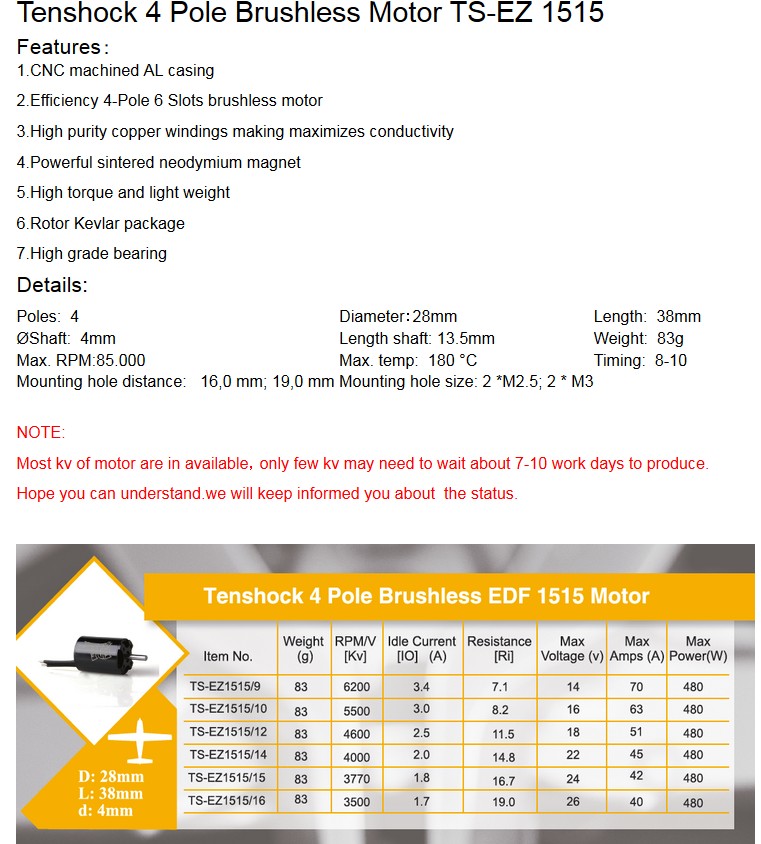
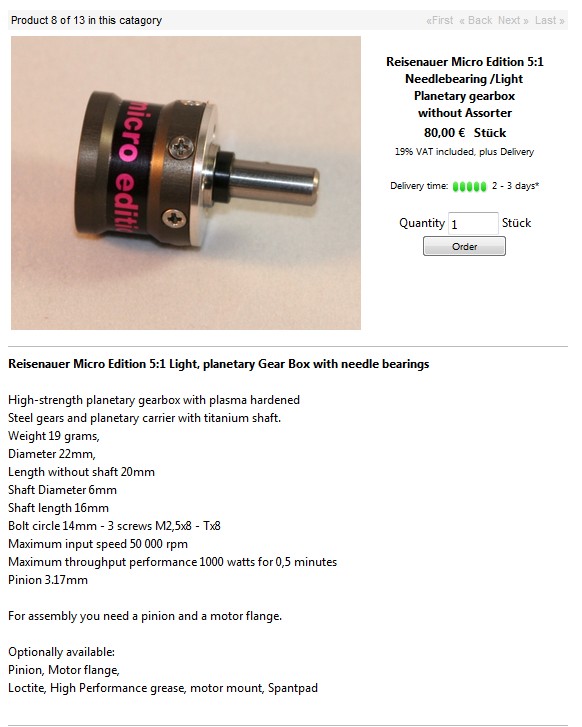
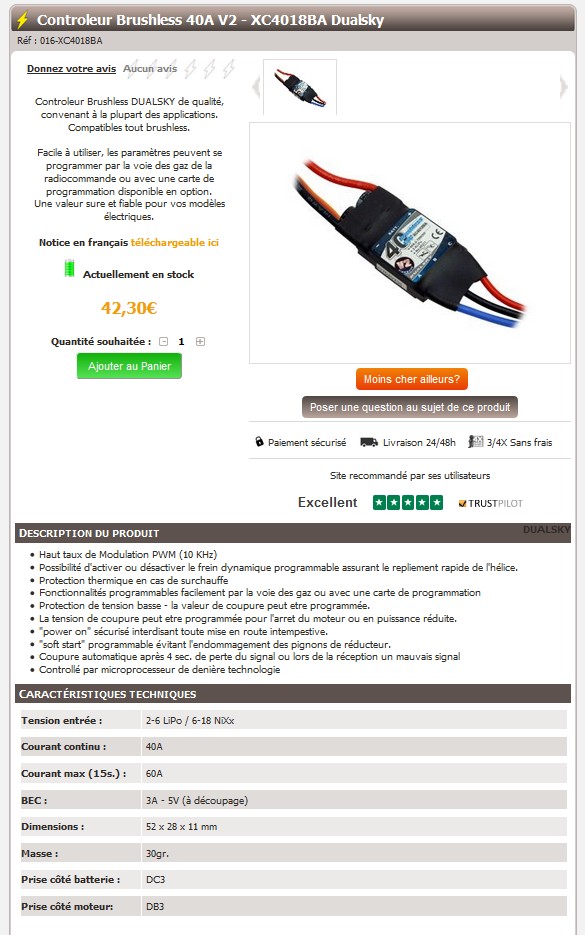

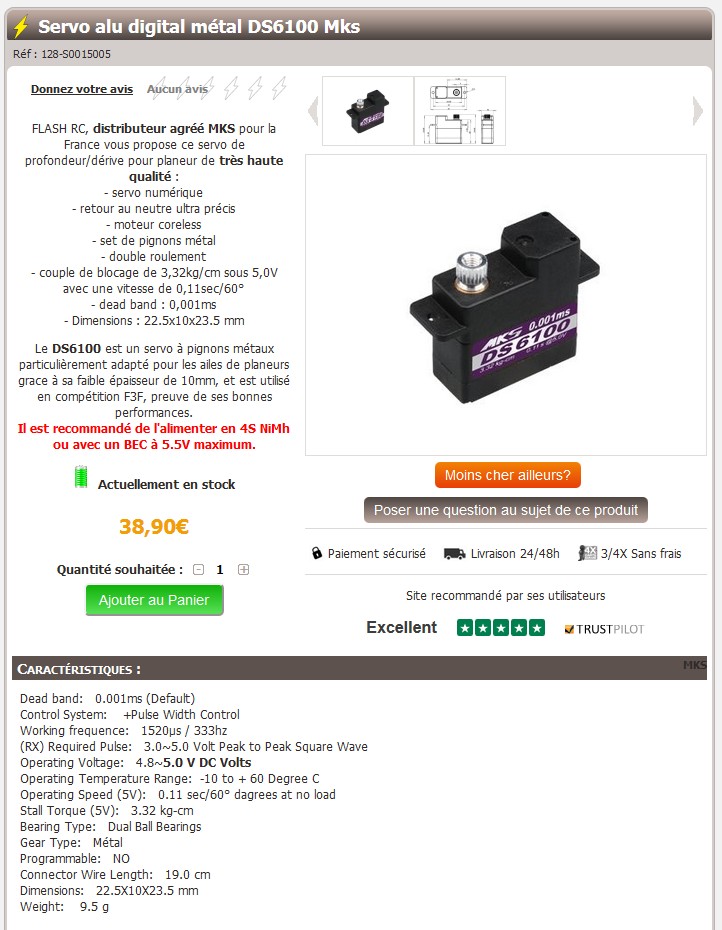















Propulsion
La machine ne dispose pas d’une puissance démoniaque, la montée est bonne sans plus. Ce manque se fait sentir cruellement lorsque l’on ballaste la machine.
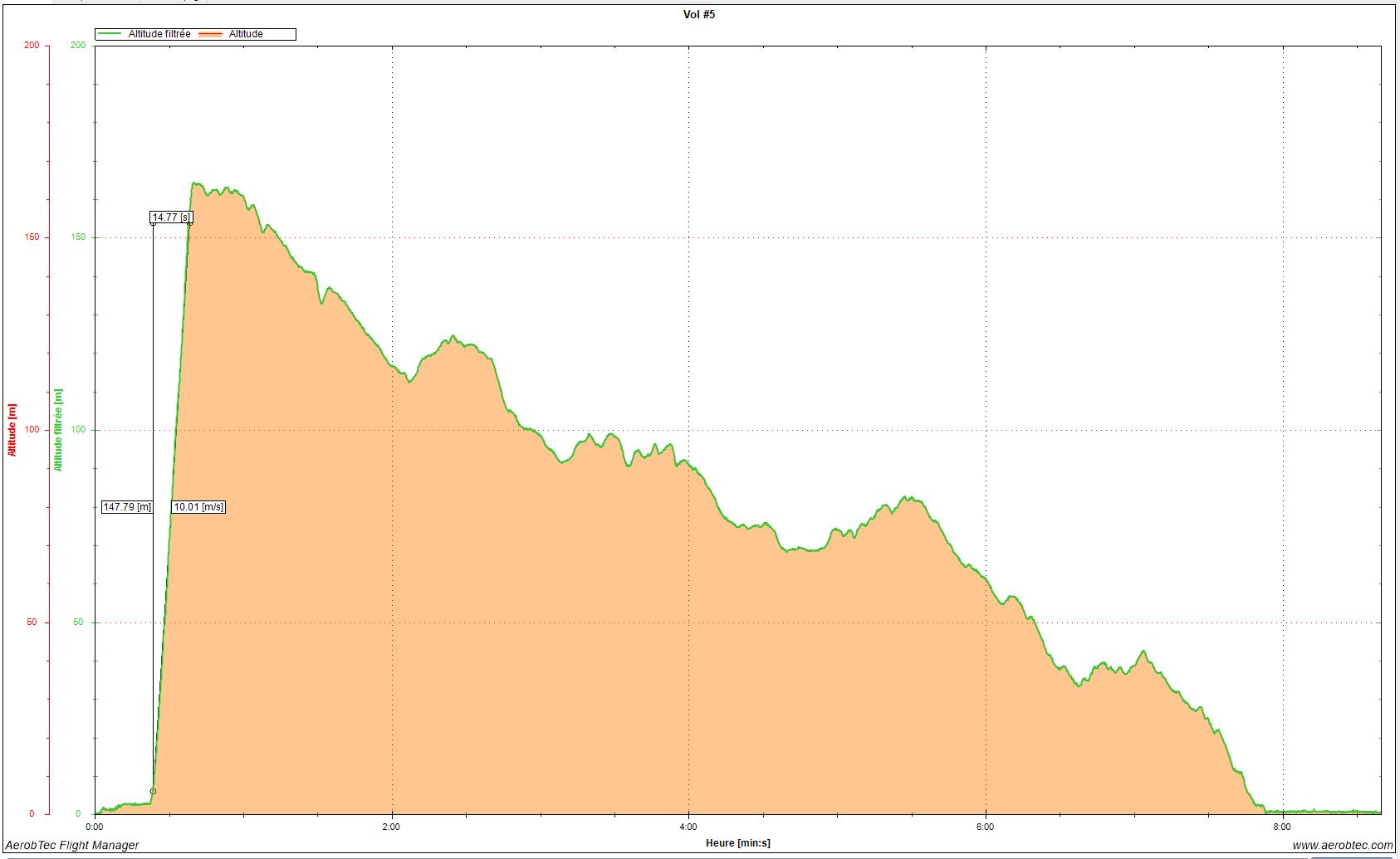
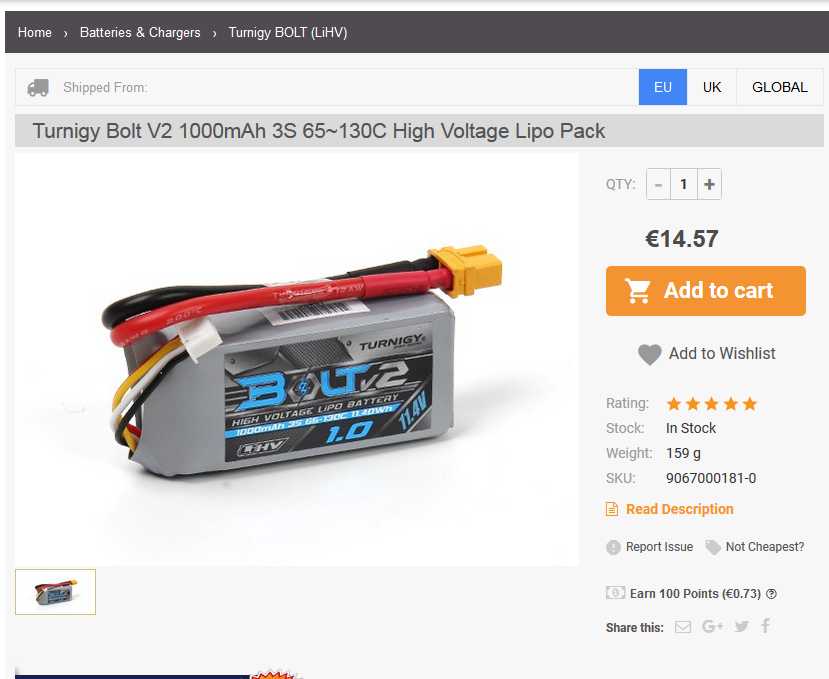
En loisirs 2 à 3 montées peuvent être réalisées, en concours seule une montée accus chargé à bloc est faîte permettant d’atteindre un taux de montée légèrement supérieur à 10m/s.
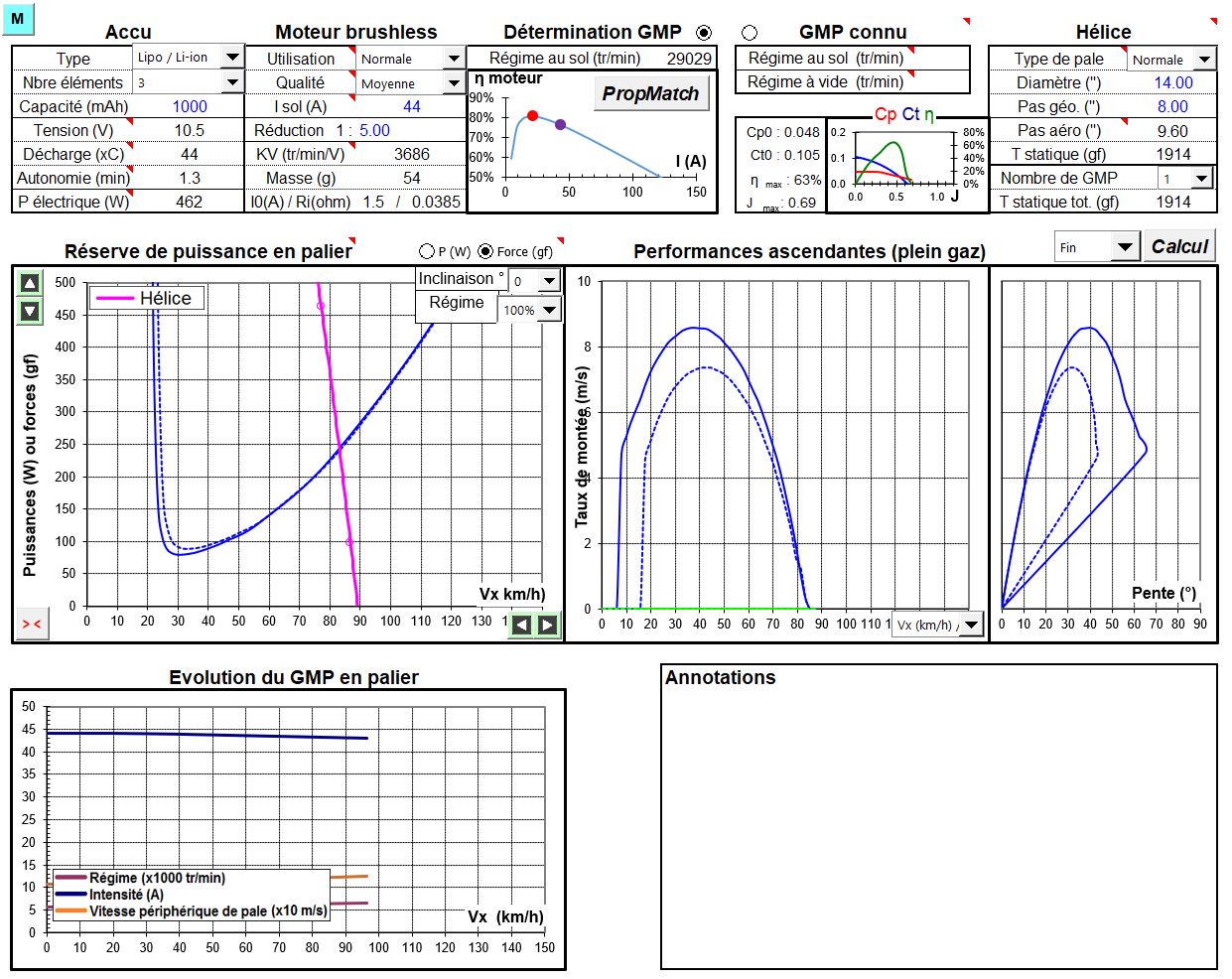
Exemple de courbe de montée atteignant les 10m/s